News
[ Aug 2024 ] - I am actively seeking faculty and postdoc positions. If you know of any suitable opportunities or believe my expertise would be a valuable addition to your team, I would appreciate your consideration. For comprehensive details about my qualifications and experience, please refer to my CV .
[ Jul 2024 ] - Our new IJRR paper on VIO initialization is now available.
[ May 2024 ] - Square Root Filter-based VINS won the ICRA 2024 Best Paper Award Finalist (Robot Vision).
[ Mar 2024 ] - Five papers accepted to ICRA 2024.
[ Feb 2024 ] - I have been awarded the Doctoral Fellowship for Excellence!
[ Jul 2023 ] - Our paper won the RSS 2023 Best Student Paper Finalist.
Research
My research interests focus on state estimation and spatial AI for robotics, including
probabilistic sensing, localization, mapping, perception and planning of autonomous ground,
aerial and underwater vehicles:
Visual-Inertial State Estimation with Decoupled Error and State Representations
Chuchu Chen* International Workshop on the Algorithmic Foundations of Robotics (WAFR)
,
2024
bibtex /
pdf
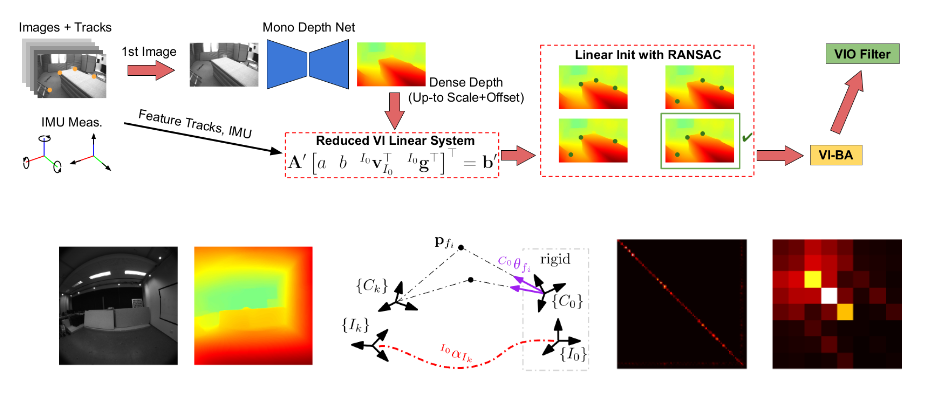
Fast and robust learned single-view depth-aided
monocular visual-inertial initialization
Chuchu Chen The International Journal of
Robotics Research ,
2024
bibtex /
pdf
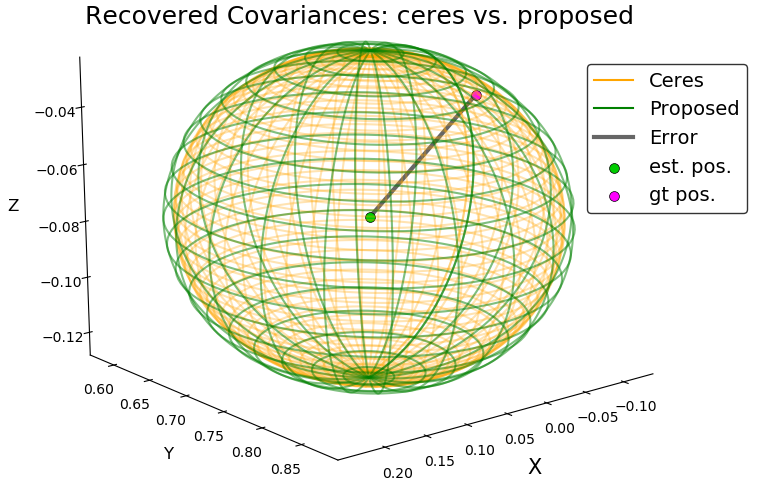
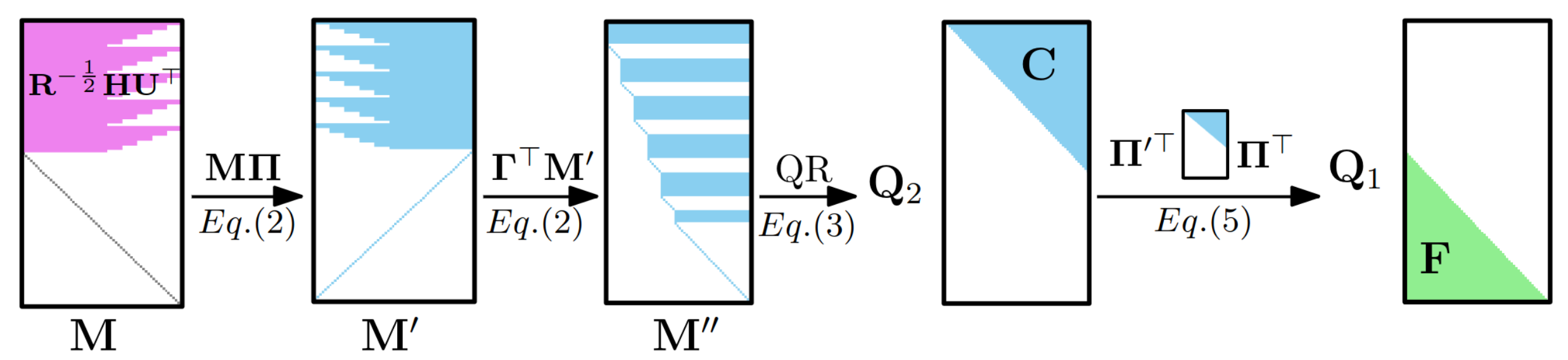
Fast and Consistent Covariance Recovery
for Sliding-window Optimization-based VINS
Chuchu Chen IEEE International Conference on Robotics and Automation (ICRA) ,
2024
bibtex /
pdf /
tech report
Ultrafast Square-Root Filter-based VINS
Chuchu Chen IEEE International Conference on Robotics and Automation (ICRA) ,
2024
[ICRA 2024 Best Paper Award Finalist (Robot Vision)]
bibtex /
pdf /
tech report
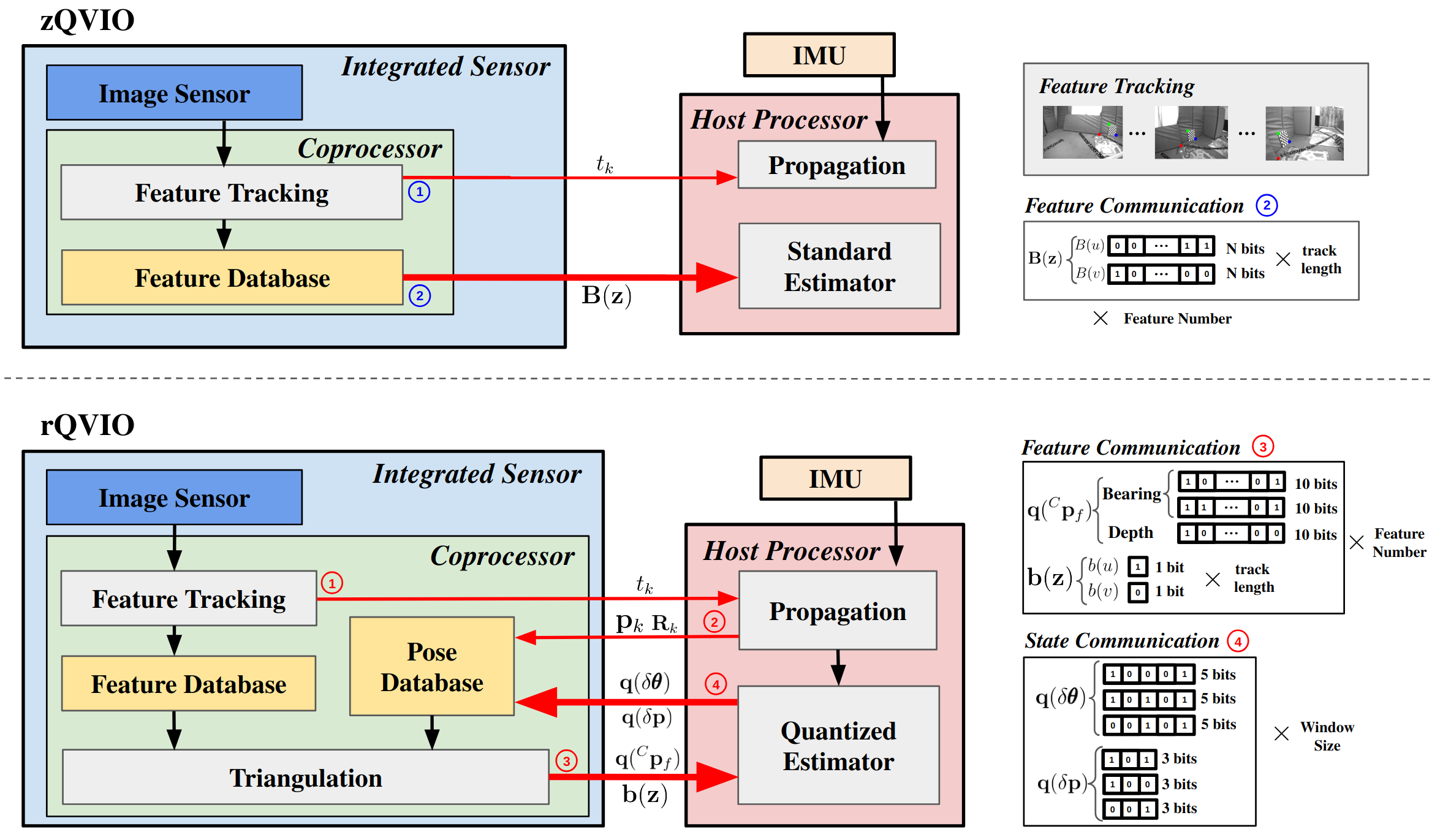
Quantized Visual-Inertial Odometry
Chuchu Chen IEEE International Conference on Robotics and Automation (ICRA) ,
2024
bibtex /
pdf
Degenerate Motions of Multisensor Fusion-based Navigation
Chuchu Chen IEEE International Conference on Robotics and Automation (ICRA) ,
2024
bibtex /
pdf /
tech report
NeRF-VINS: A Real-time Neural Radiance Field Map-based
Visual-Inertial Navigation System
Chuchu Chen IEEE International Conference on Robotics and Automation (ICRA) ,
2024
bibtex /
pdf /
tech report
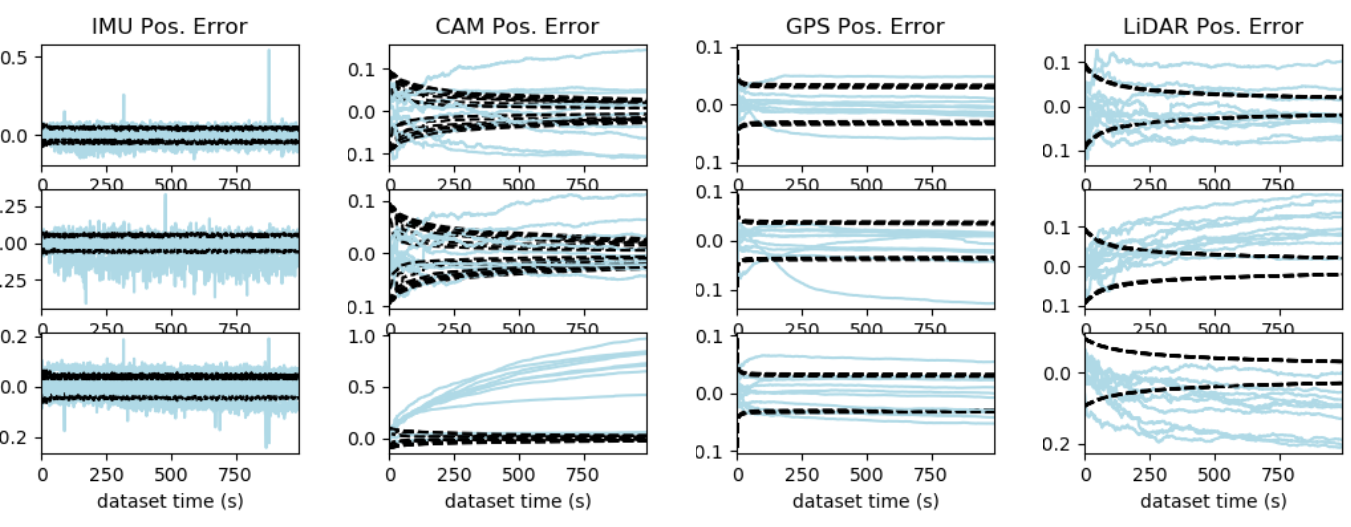
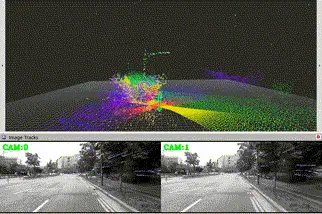
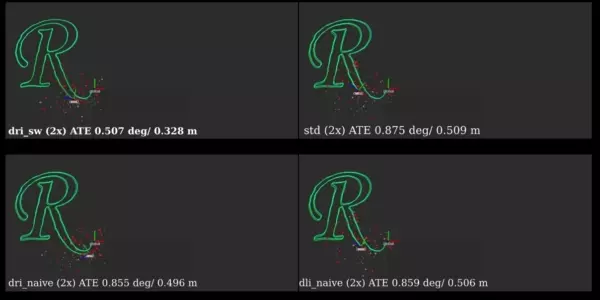
MINS: Efficient and Robust Multisensor-aided Inertial Navigation System
Chuchu Chen arXiv ,
2023
bibtex /
pdf /
code
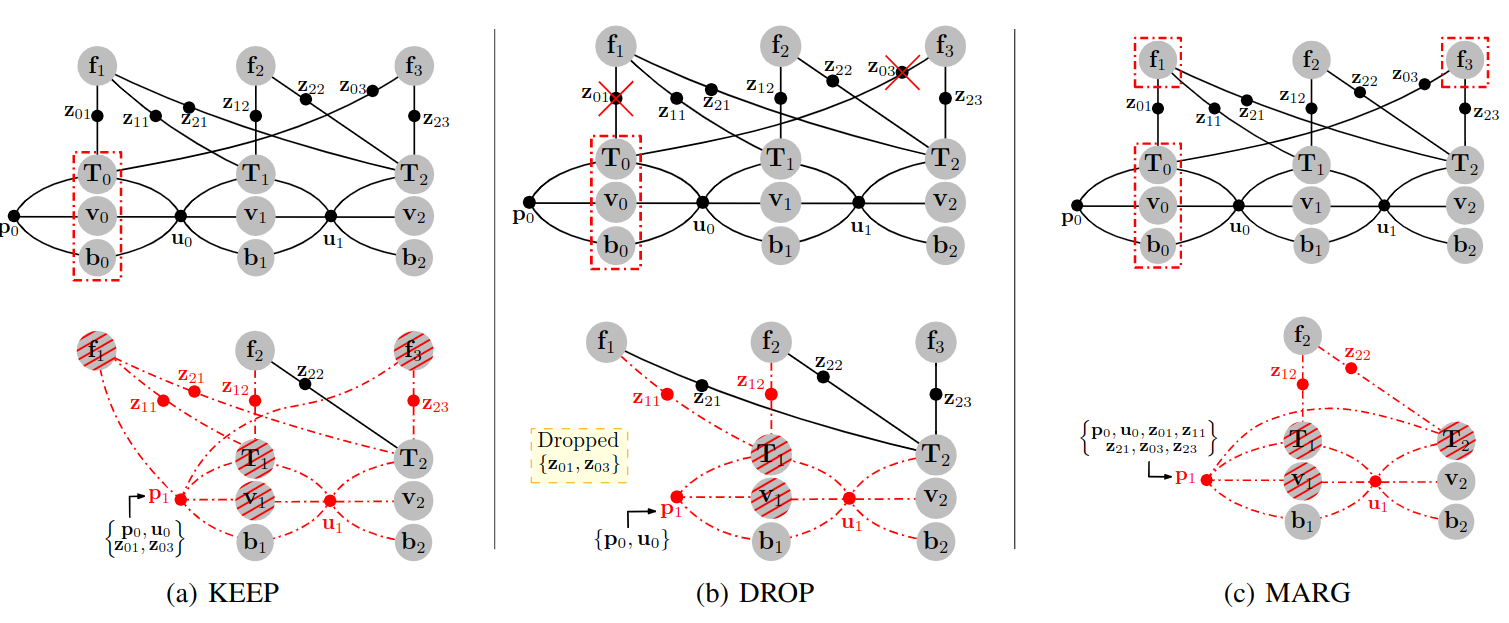
Optimization-based VINS: Consistency, Marginalization, and FEJ
Chuchu Chen IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) ,
2023
bibtex /
pdf /
tech report /
slides /
talk
Fast Monocular Visual-Inertial Initialization Leveraging Learned Single-View Depth
Chuchu Chen Proc. of Robotics: Science and Systems (RSS),
[Best Student Paper Award Finalist]
2023
bibtex /
pdf /
tech report /
video
Monocular Visual-Inertial Odometry with Planar Regularities Chuchu Chen* International Conference on Robotics and Automation (ICRA) , 2023
bibtex /
pdf /
video /
slides /
talk /
dataset /
source code
Visual-Inertial-Aided Online MAV System Identification Chuchu Chen * IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) ,
2022
bibtex /
pdf /
tech report /
slides /
video /
talk
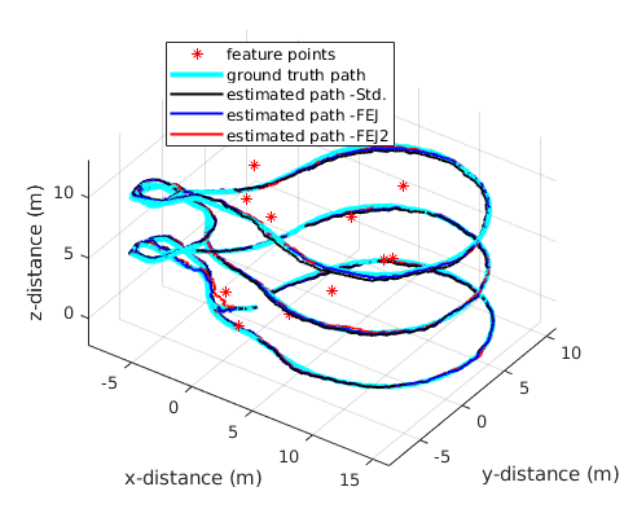
FEJ2: A Consistent Visual-Inertial State Estimator Design Chuchu Chen International Conference on Robotics and Automation (ICRA) , 2022
bibtex /
pdf /
tech report /
slides /
talk
Decoupled Right Invariant Error States for Consistent
Visual-Inertial Navigation
Chuchu Chen IEEE Robotics and Automation Letters (RAL) , 2022
bibtex /
pdf /
tech report
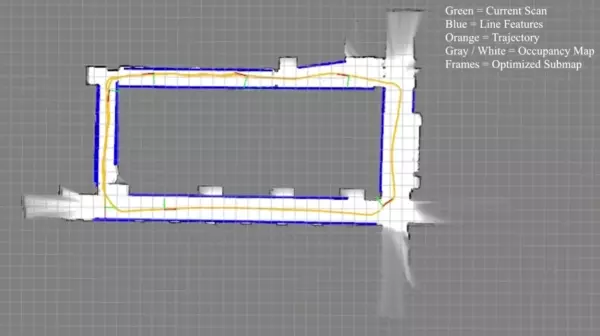
Versatile 3D Multi-Sensor Fusion for Lightweight 2D Localization
Chuchu Chen IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) ,
2020
bibtex /
pdf /
video /
slides
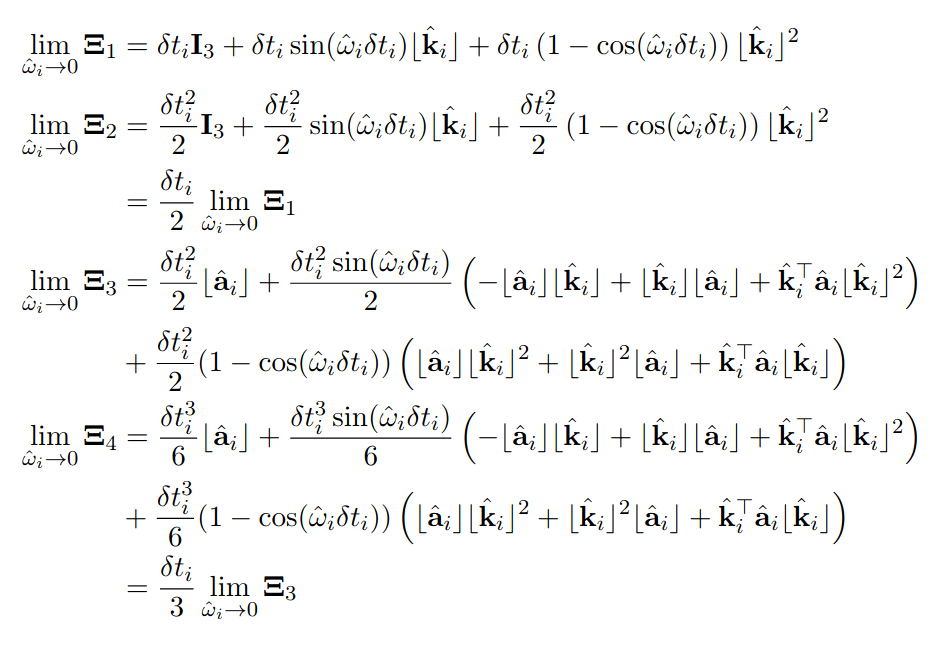
Analytic Combined IMU Integration (ACI^2) For Visual Inertial
Navigation
Chuchu Chen IEEE International Conference on Robotics and Automation (ICRA) , 2020
bibtex /
pdf /
video /
supp. materials
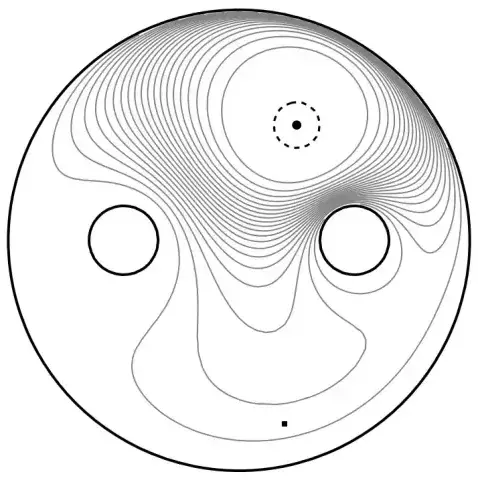
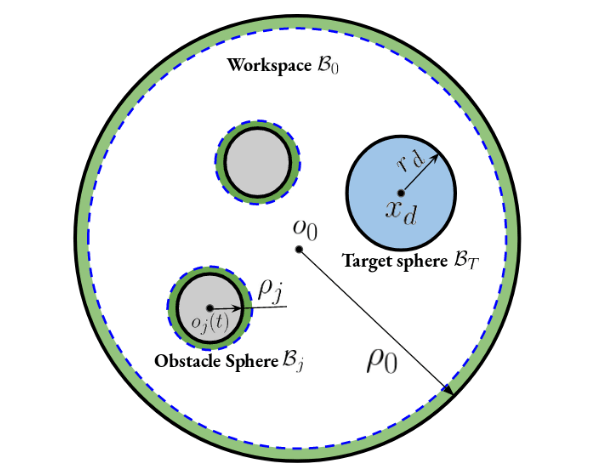
Navigation Functions with Moving Destinations and Obstacles Chuchu Chen* Autonomous Robots , 2023
bibtex /
pdf /
video
Navigation Functions with non-Point Destinations and Moving
Obstacles
Chuchu Chen American Control Conference (ACC) , 2020
bibtex /
pdf